
Se abre este espacio temporalmente en el presente medio para servir de canal de comunicación con el grupo de investigación Robótica, perteneciente a la línea de Investigación Robótica del Departamento de Mecánica y Tecnología de la Producción.
PRIMERA REUNIÓN 2017 GRUPO DE INVESTIGACIÓN ROBÓTICA.
Fue PRESENTADO en primera reunión del Grupo de Robótica el avance del prototipo de carro teleoperado diseñado y construido por el grupo de investigación en conjunto con el profesor Enrique Acasio. El sistema de unidad tractor, y su sistema de acoples estuvo a cargo de los estudiantes: Jesús Franco, Justo López y Javier Henríquez, mientras que el chasis y las ruedas por parte del Ing. Enrique Acasio.
Puntos tratados en la primera Reunión del grupo de Investigación Robótica de la UNEFM. Complejo Académico el Sabino. Dicho encuentro se dio en la sala de reuniones del CITIP. De 9:00 a 11:00 am. Miércoles 01 de Marzo de 2017.
* Seminario Ibrahim López García: Investigación Científica Profundamente subversiva
* Presentación Diseño de un sistema robotizado para el mantenimiento de las líneas energizadas de 115 Kv de la Coro – Punto Fijo, del Estado Falcón.
* Avance del diseño y pruebas de Vuelo de Modelos Bayure. Drones.
* Proceso de Vacuformado para la elaboración de fuselaje de modelos.
* Avance y presentación del modelo robótico para el estudio de sistemas industriales.
* Avance del T.G Laboratorio de Robótica para la UNEFM.
* Posibilidad de construir modelos ornitópteros para exhibición.
CONTINUACIÓN DEL SEMINARIO “IBRAHIM LOPEZ GARCIA”
En la reunión se dio continuación al Seminario “Ibrahim López García: Investigación Científica Profundamente Subversiva.” Con la participación de algunos profesores y alumnos de nuestra casa de estudios. Dicho evento se realizó en la sala de reuniones del CITIP.
Se hizo lectura de algunas citas referenciales del autor, exponiendo el verdadero pensamiento Lopezgarciano. Entre ellas destacan las siguientes:
“Nada es Perfecto, todo es Perfectible”.
“Hay que librar una lucha inmediata por la instalación de laboratorios para todas las materias técnicas”
“Solamente la combinación de la teoría con el laboratorio artificial o natural dará al traste a la larga con nuestra dependencia tecnológica y generará una verdadera tecnología autóctona”
Del texto El Codigo Ibrahim Ediciones Nuevo Día se dio lectura a párrafo de presentación autoría del Alcalde de Carirubana, Alcides Goitia de titulo:
Profeta de la Ciencia.
“El ejemplo de Ibrahim es el del visionario de la ciencia. Es el hombre que se adelanta a su tiempo gracias al saber. Su vida es un poderoso mensaje de esperanza porque nos invita a soñar y pensar más allá de las limitaciones geográficas o económicas. Ibrahim es, de cierta forma, un profeta de la ciencia que predicó con su ejemplo y su obra que la condición humana es buena y digna por naturaleza. Este libro es una excelente oportunidad para llenarnos de sana autoestima falconiana y ambición por el saber. La obra de Ibrahim llama a los jóvenes de nuestro pueblo a militar en la ciencia aplicada al servicio del hombre.”
“La obra de Ibrahim llama a los jóvenes de nuestro pueblo a militar en la ciencia aplicada al servicio del hombre.” Alcides Goitia.
 Modelo Tridimensional de Unidad robótica. El sistema contará con tracción mediante orugas, el cual podrá cambiarse, si se requiere por ruedas. (Autor: Acasio)
Modelo Tridimensional de Unidad robótica. El sistema contará con tracción mediante orugas, el cual podrá cambiarse, si se requiere por ruedas. (Autor: Acasio)
REPRESENTACIÓN DE LA UNEFM ANTE EL 1ER CONGRESO INTERNACIONAL DE ANTROPOLOGIAS DEL SUR 2016.
DE FALCÓN PARA NUESTRO CONTINENTE SUR.

Prof. Acasio presentando Ponencia de Robótica aplicada a la arqueología en la ciudad de Mérida.
El Prof. Enrique Acasio representó a la Universidad Nacional Experimental Francisco de Miranda.-UNEFM.- en el 1er Congreso Internacional de Antropologías del Sur 2016 celebradas en el estado Mérida, Municipio Libertador del 10 al 15 de Octubre al presentar dos ponencias en el Magno evento.
La primera fue realizada el martes once en una sala de estudios del Colegio Universitario Hotel Escuela de los Andes Venezolanos (CUHELAV) de título: “Diseño y Aplicación de unidades de exploración robótica para estudios arqueológicos: Carros Teleoperados y vehículos aéreos.” Cabe destacar que la ponencia fue realizada a sala llena, con algunas autoridades y coordinadores del evento, en especial, la presencia de la Dra. Jacqueline Clarac de Briceño. Presidenta del comité organizador general. Fundadora de la Red de Antropologías del Sur y profesora de la Universidad de los Andes.-ULA.

Muestra de los dos Carros Teleoperados Cruxent 1 y 2, asi como de los Drones Experimentales Bayure 1 y 2.
Podra descargar un libro digital sobre la ponencia segun transcripción de un audio grabado en el evento. ponencia-robotica-primer-congreso-internacional-de-antropologias-del-sur (DESCARGABLE PDF)
La segunda ponencia fue realizada el día jueves trece en la Biblioteca Tulio Febres Corderos de título: “Reconstrucción facial 3D digital de un originario Jirajara mediante software libre y código abierto en orden a la visibilización etnohistórica y el fortalecimiento colectivo identitario. Coro. Estado Falcón. Venezuela”. Cuyo trabajo en coautoría con el ingeniero Osman Acasio, y el Dr. Médico cirujano, Reinaldo Velasco fue defendido ante un panel de antropólogos profesionales de la UCV, la ULA y LUZ entre otras. “Debo confesarlo, hemos recibido una bofetada”, comentario expuesto tras finalizar la presentación, por Edgar Valero, coordinador del Simposio 13 miembro de la Sociedad Venezolana de Antropología física “Charles Darwin” (SOVENAF). Simposio en el cual estaba inscrita la ponencia. Al parecer nuestra presentación hizo tambalear el paradigma de cómo se realiza antropología en Venezuela por los “verdaderos antropólogos”. También destacaron que la reconstrucción facial digital viene a convertirse en la primera a realizarse en nuestro país. Vale recordar que la reconstrucción facial 3D del rostro de nuestro libertador Simón Bolívar fue realizada por el forense Philippe Froesch en Francia, Europa.

Ponencia de Bioantropologia.


El resumen de la primera ponencia podrá leerla en el libro de resúmenes del primer congreso Internacional de Antropologías del sur Eje temático II; Arqueologías del sur y en el sur. Simposio V: Arqueologías del sur Coordinado por los Msc Camilo Morón y Anderson Jaimes, en la pág.120.
La segunda ponencia Eje temático VI; Bioantropologia. Simposio XIII: Bioantropologia de Comunidades y pueblos indígenas actuales y pretéritas del sur. Coordinado por los antropólogos Merri Barrios y Edgar Valero. Ambos miembros de la Sociedad Venezolana de Antropologia física “Charles Darwin” (SOVENAF), en la pág.311.
Libro Resumenes Congreso-internacional-de-antropologias-del Sur (Para Descargar Formato PDF)
ENTREGA DE ENSAYO SOBRE ROBÓTICA BIPEDA.
Saludos cordiales Estudiante del Grupo de Investigación Robótica de la UNEFM. Les envío un pequeño ensayo sobre robótica de caminantes bípedos de título: Estudio descriptivo de los patrones de movilidad en Robots de pelea creados en Japón. Sugiero su lectura como conocimiento complementario de nuestra unidad de investigación Robótica. Estoy trabajando en un libro digital más complejo, con el análisis de unos seis modelos. Tendrá un total de unas 50 páginas. Pronto les será enviado. También se anexa el texto para el seminario de Ibrahim López García en formato PDF y 3 imágenes en JPG. Saludos.
ensayo-robotica-estudio-robots-de-pelea (DESCARGAR PDF)
el-codigo-ibrahim-grupo-robotica (DESCARGAR PDF)



R
EXHIBICIÓN DE LAS UNIDADES ROBOTICAS DE EXPLORACIÓN Cruxent 1 y 2.

Coro La Alameda
El día viernes 26 de agosto fue abierta al público la exhibición de los Modelos de exploración robótica Cruxent 1 y Cruxent 2, en la sala número 2 de la Casa del Balcón de los Arcaya, antiguo Museo de cerámica histórica y loza popular adscrita a la UNEFM; calle Zamora, zona colonial “La Alameda”, Coro. Edo Falcón. Venezuela.
Agradecimiento desde éste espacio al Mgs.Sc . Camilo Morón, Jefe del Centro de Investigaciones Antropológicas, Arqueológicas y Paleontológicas (CIAAP) por el apoyo y la logística brindada para la presentación y puesta en vitrinas de ambos modelos prototípicos.
A continuación se presenta al interesado una vista en detalle de cada elemento exhibido, así como su respectivo rotulado museístico, nota de prensa y texto explicativo, para ello es mostrado primero en una imagen deconstruida de la muestra presente en cada una de las vitrinas. Iniciando con la vitrina 1.

Vitrina 1 en donde se exhibe el Carro Robot Cruxent 1.

Desglose de lo mostrado en el interior de la vitrina N° 1.
(1)
 Panorámica del Interior de la galería natural
Panorámica del Interior de la galería natural
(2) Introducción del Carro Robot Cruxent 1 en la pequeña entrada de la cueva
Introducción del Carro Robot Cruxent 1 en la pequeña entrada de la cueva
(3)

Nota de Prensa. Nuevo Día. Sumario.
(4)

CRUXENT 1 en espera de instrucciones para iniciar registro del entorno subterráneo.
(5)

Para mayor información: http://www.rupestreweb.info/carrorobot.html
(7)
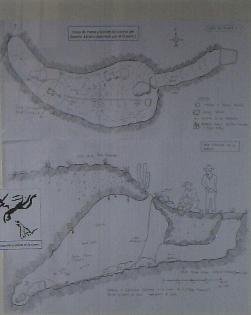
Vistas de Planta y Sección del interior del Sistema Kárstico explorado por el Cruxent 1.
(8) Campaña de Exploración realizada a la cueva de la “Peña Manaure”. Eje de la Sierra de Coro. Noviembre de 2013. Vista seccional del sistema Kárstico.
(9)
El robot fue utilizado en una campaña de exploración hacia el interior de una galería o recamara espeleológica. Introduciéndose a través de una entrada de apenas 30x25cm. Una vez realizado un corto recorrido y posicionándose en el centro, logra realizar un registro en 360° del interior con sus sensores obteniendo el descubrimiento de pintura parietal en un costado de la cueva. Una serie de pictografías en color negro con diferentes trazados y espesores, proponiendo un posible uso de pinceles de diferentes grosores. Un par de figuras zoomorfas, así como un grupo de figuras geométricas y abstractas.
(10)
(11)Rueda tractora de repuesto. Material; silicón Blanco
(12)

Carro Robot Teleoperado Cruxent 1. Año 2013.

(13) Cordón umbilical de navegación y registro.
(14) Caja de Control.

Segunda Vitrina en donde se exhibe el Carro Robot Cruxent 2.

Desglose de lo mostrado en el interior de la vitrina N° 2.
(1)
(2)

(3)
(4) (5)
(5)
Los robots son la integración en correcta armonía de partes mecánicas, electrónicas y sistemas de informática. Mecanismos multifuncionales desarrollados para la realización de trabajos diversos, principalmente la exploración del ambiente y recopilación de datos, así como la manipulación de objetos; herramientas, cargas o útiles especiales. El termino robots proviene de las palabras Checas Robota (Trabajo forzado) y Robotnik (sirviente), y fue utilizada por vez primera en la obra de teatro Rossum’s Universal Robot (R.U.R.) del escritor checo Karel Capek en 1921, en referencia de un humanoide mecánico. La tele-robótica es ampliamente utilizada en aplicaciones que ofrezcan facilidades en tareas dirigidas de forma remota, así mismo es un objeto de estudio vigente en investigaciones y desarrollos para operaciones en zonas de difícil acceso, en las cuales un robot móvil permite apoyar al operador en tareas de exploración y control. En este trabajo se presentara la descripción del diseño e implementación de un carro explorador a distancia a través de un cordón umbilical para comunicación, entre el carro-robot y la aplicación diseñada para su monitoreo y control, extendiendo las capacidades sensoriales y motoras de éste a localizaciones remotas.
(6)

PROTOTIPO CRUXENT 2 en espera de trabajo de campo
(7)
Encartado “Línea evolutiva de los carros arqueológicos (1992-2013)”.
(8)Libro “Carros arqueológicos”. Autor: Enrique Acasio.

Autor junto a la exhibición.
Se tiene pautado exhibir los modelos robóticos un par de meses. Esta presentación por la web se mantendrá a la par con la muestra museística en Coro.

Casa del Balcón de los Arcaya, calle Zamora, zona colonial “La Alameda”, Coro. Edo Falcón.

Ubicación de la Exhibición. Planta Baja.
NOTAS:
El grupo de investigación Robótica ha iniciado la construcción de un modelo de carro robot operado remotamente para inspecciones industriales en espacio confinado, ductos, tuberías, entre otros medios inaccesibles para el hombre. Para tal efecto, el grupo se dividió en subgrupos, a modo de distribuir la carga de trabajo referente a su construcción. Hasta la fecha ya se han realizado cuatro (4) reuniones oficiales para la discusión del diseño del prototipo. La fase inicial consiste en la construcción del chasis o barcaza del modelo en lámina de acero galvanizada e instalación de los dos sistemas de tracción- caja reductora para disponer del sistema locomotor del modelo. La evolución y desarrollo del prototipo será mostrada a todos los interesados por este medio.

Estudiantes del Grupo de Investigaciòn Robotica Trabajando en modelo locomotor.
Fue entregado al grupo de investigación robótica un tomo del libro “CARROS ARQUEOLOGICOS” (2014) del autor Enrique Acasio para su consulta en el diseño de la versión rodante que los estudiantes están construyendo. Este texto servirá de inspiración y material referencial para analizar los diversos modelos creados en el mundo, y los modelos Cruxent construidos en nuestro país. El texto está siendo rotado a todos los integrantes del grupo para su lectura. Se recomienda del mismo la profundización del capítulo seis; Teorías de Exploración Robótica, pág. 106, muy en especial la metodología Japonesa de exploración YAMAUCHI.
 Frontispicio y Resumen del Texto
Frontispicio y Resumen del Texto
INICIO DEL SEMINARIO “IBRAHIM LOPEZ GARCIA”
El día miércoles 3 de Agosto se dio inicio al Seminario “Ibrahim López García: Investigación Científica Profundamente Subversiva.” Con la participación de algunos profesores y alumnos de nuestra casa de estudios. Dicho evento se dio en la sala de reuniones del CITIP, tal y como estaba planificada.
Se hizo lectura de algunos libros referenciales, muy en especial del trabajo de ascenso realizado por Ibrahim López García para subir de categoría en el escalafón académico en la Universidad Central de Venezuela, en Caracas, de titulo; Sobre trompos, cúpulas y Vuelos, considerado una de sus magnas obras.
Se abrio el ciclo del seminario estudiando la biografia de Ibrahim García, ademas de un resumen sobre sus logros como ingeniero civil y sus trabajos sobre estructuras membranales, para posteriormente entrar en materia sobre su artilugio volador. Un Punto de gran interes en el seminario.

Profesor Acasio realizando lectura de uno de los textos a estudiar en el Seminario. Estudiantes tomando apuntes para su posterior disertaciòn, asi como la profundizaciòn del tema en otras areas de estudio.
Para los presentes se proyectó parte del corto documental “Independencia Tecnológica”: La nave giroscópica de Ibrahim, en donde se muestra la vida y obra del ilustre falconiano, así como de sus trabajos referidos al artilugio volador.

Proyecciòn de Corto Documental para su posterior disertación.

Giroscopo en Vuelo
Captura de pantalla de vuelo histórico mostrado en el documental. El modelo fue elevado en los médanos de Coro en una prueba extremadamente secreta. La imagen presente fue creada mediante IGC. Imágenes generadas por computadora. Se desconoce si existe evidencia gráfica o de video de tal evento histórico.
Para las próximas sesiones de trabajo se espera finalizar el cortometraje documental, así como la proyección de otros cortos que reflejan el pensamiento Lopezgarciano.



Material Referencial a ser estudiado en el seminario.
OBJETIVOS Y ESTRUCTURA DEL SEMINARIO
Objetivos
El objetivo general del Seminario de titulo. Ibrahim López García: Investigación Científica Profundamente subversiva es primeramente dar a conocer el importante legado de nuestro científico universal falconiano, estudiar sus pensamientos filosóficos y establecer un puente en común sobre sus profundas convicciones con nuestros jóvenes estudiantes. Se espera que la discusión sobre este tema, en la que participaran estudiantes, administrativos y profesores, entregue un valioso enfoque sobre cómo canalizar la investigación científica y tecnológica que se desarrolla en nuestra casa de estudios.
Los objetivos específicos serán las siguientes:
- Familiarizar a los participantes con el contenido, estructura y metodología del seminario con la vida y obra de Ibrahim López García.
- Identificar los elementos claves de su trayectoria profesional.
- Discutir sobre la pertinencia de los contenidos de cada módulo para pulir y mejorar el seminario para posteriores entregas.
- Estudiar los prototipos de giróscopos voladores y entender su funcionamiento.
Estructura del Seminario
El seminario será desarrollado en tres días de trabajo, distribuidos en tres miércoles de semana, iniciando la primera sesión el día miércoles 3 del presente mes. Estos, organizados en torno a sesiones de discusión y presentación de micro ponencias, trabajo de grupo con una metodología abierta y participativa.
los miercoles de trabajo seràn definidos acorde a la capacidad de todos los miembros y participantes del seminario de poder asistir.
Las sesiones de trabajo serán programadas en tres áreas:
- La Biografía del ilustre pensador para abordar y entender el contexto de su vida y obra. Establecer los periodos o fases donde dio, por ejemplo inicio a sus trabajos de vehículos voladores. Las Universidades que recurrió para dar pie a su proyecto entre otros.
- El pensamiento Lopezgarciano para analizar y difundir su modo de concebir la tecnología y de masificar ese conocimiento hacia las generaciones presentes. En esta parte del seminario se tomaran y analizaran sus trabajos, sus publicaciones y sus intervenciones en los medios de comunicación para analizar su mensaje.
- Estudio del trabajo: Sobre Trompos, Cúpulas y Vuelos. Teoría y Ensayos en torno a una nave giroscópica. Se realizaran algunas lecturas sobre su magna obra, y se estudiaran algunos videos cortos documentales sobre el desarrollo de estos vehículos aéreos.
EXHIBICIÓN DE MODELO ROV EN II JORNADA DE DIVULGACIÓN CIENTIFICA DEL PROGRAMA DE INGENIERIA PESQUERA UNEFM
El día martes 26 de Julio en las instalaciones físicas del club Miramar en Cardón se realizó la ponencia de título: Diseño y Aplicación de una Unidad Sumergible teleoperada para exploración y registro de entornos Submarinos. Estado Falcón. Venezuela. En el marco de la II JORNADA DE DIVULGACIÓN CIENTIFICA DEL PROGRAMA DE INGENIERIA PESQUERA UNEFM.
El Profesor Acasio, presentó la ponencia sobre los logros alcanzados con el diseño, construcción y pruebas preliminares del modelo experimental. Con un total de 33 láminas se mostró a todos los presentes el avance del mismo. También fue una oportunidad para mostrar a toda la audiencia el modelo en vivo.
Cabe destacar, que en esta ponencia se hizo referencia de la conformación del grupo de la línea de investigación robótica y del trabajo que vienen realizando nuestros muchachos en la UNEFM. El Sabino. Agradeciendo por este medio al Prof. Carlos Goitia, Director de Ing. Pesquera por su invitación y apoyo en el evento, así como a todo su tren de apoyo. El evento fue todo un éxito, proyectando un gran despliegue de conocimiento y tecnología.

Portada presentación de la Ponencia.

Diferentes vistas del modelo ROV.
EXHIBICIÓN DE LOS CARROS TELEOPERADOS CRUXENT 1 Y 2 EN LAS VIII JORNADAS DE INVESTIGACION DE LA UNEFM 2016
Los días 20, 21 y 22 de julio se dieron las VIII JORNADAS DE INVESTIGACION DE LA UNEFM 2016 en el modulo C de los Perozo, Santa Ana de Coro. Junto al stand del Centro de Investigaciones Arqueológicas, Antropológicas y Paleontológicas se presentaron las unidades exploratorias.
Fue presentado una imagen escala natural 1:1 de la Piedra de Siraba, a modo de pendón o tapiz en la pared. Siendo un sitio arqueológico presente en la falda del Cerro de Santa Ana, cuya pieza lítica presenta grabados o petroglifos de gran contexto arqueoastronómico. Investigaciones evidencian que se trata de un sistema para computar el tiempo y las estaciones mediante el movimiento del sol sobre el horizonte.


En primer plano Carro Teleoperado de tracciòn por orugas Cruxent 2. Al fondo vitrina con muestras Arqueologicas del CIAAP. Coro.

Presentación ante las autoridades del trabajo realizado.

Profesor Acasio en Jornada. Al fondo Petroglifos de la Piedra de Siraba.

EXHIBICIÓN DE CARRO ROBOT CRUXENT 2 EN SIMPOSIO DE INVESTIGACIÓN TECNOLÓGICA UPTAG. CORO
El día viernes 15 de julio fue exhibido el modelo Cruxent 2 en la Universidad Politécnica Territorial de Falcón Alonso Gamero. UPTAG en coro bajo una ponencia de título: Diseño y aplicación de unidades de exploración robótica: Carros Teleoperados para el estudio Arqueológico en sistemas Kársticos. Al finalizar la ponencia, y tras la sesión de preguntas, se encendió el modelo y se realizó pruebas de operatividad para el deleite y asombro de todos los presentes.
 Diferentes vistas del modelo Cruxent 2. Puede apreciarse en las gráficas un brazo antropométrico construido para manipulación y recolección de muestras. Diseño modular que también puede ser adaptado al ROV submarino.
Diferentes vistas del modelo Cruxent 2. Puede apreciarse en las gráficas un brazo antropométrico construido para manipulación y recolección de muestras. Diseño modular que también puede ser adaptado al ROV submarino.


Presentación de ponentes y parte del comité organizador.
PRIMERAS PRUEBAS DE ROBOT SUMERGIBLE ROV.
El lunes 25 de julio se dieron las primeras pruebas del modelo prototípico de vehículo submarino ROV en la bahía de Carirubana. Estas consistieron en probar la estabilidad y flotabilidad del modelo, así como sus sistemas propulsores. Las próximas pruebas, de mayor duración y rigurosidad serán realizadas por los miembros de la línea de investigación en trabajo de campo. Próximamente será fijado lugar y fecha de dicha salida. Estas pruebas iníciales cortas fueron realizadas con el objeto de obtener evidencia gráfica del funcionamiento y operatividad del modelo.- que aun se encuentra en un 80% de su construcción.- para ser mostradas en la II Jornada de Divulgación Científica de ingeniería Pesquera el día martes 26 de Julio. Presentación realizada por el profesor Acasio el martes en la tarde con ponencia de título: Diseño y Aplicación de una Unidad Sumergible teleoperada para exploración y registro de entornos Submarinos. Estado Falcón. Venezuela.
Cabe destacar, que en esta ponencia se hizo referencia de la conformación del grupo de la línea de investigación robótica y del trabajo que vienen realizando nuestros muchachos en la UNEFM. El Sabino.

El modelo “aun sin nombre”, conocido simplemente como ROV navegando hacia lo profundo.

Prueba de estabilidad del Modelo. Impulsores Parados.

Pruebas Preliminares realizadas en la Bahia de Carirubana.
PRESENTACIÓN DE CARROS CRUXENT 1 Y 2 EN IMPARQUES. SANTA ANA DE CORO.
El día martes 20 de Junio en las instalaciones físicas de IMPARQUES, en la falda del cerro Santa Ana se realizó una serie de charlas a la comunidad con el fin de socializar conocimientos sobre los estudios realizados a la manifestación rupestre presente en el cerro. El evento fue amenizado por personal de imparques, en colaboración con profesores de la Universidad Bolivariana de Venezuela (UBV) y la Universidad Francisco de Miranda (UNEFM). Codo moderador del evento el Dr Reinaldo Velasco de la UBV, ponencia de mi autoría (Acasio): Estudio de los Petroglifos del Cerro Santa Ana, Península de Paraguana. Estado Falcón, y ponencia del Licdo. Leonardo Ríos de título: Capú-ana: el cerro mítico de los Caquetios. En dicho evento se mostró imágenes de los modelos robóticos, así como la presentación de mi libro: “Piedras Parlantes de Siraba”.

Portada presentación de la Ponencia.











